What is a Rockbreaker in Mining?
What is a Rockbreaker in Mining?
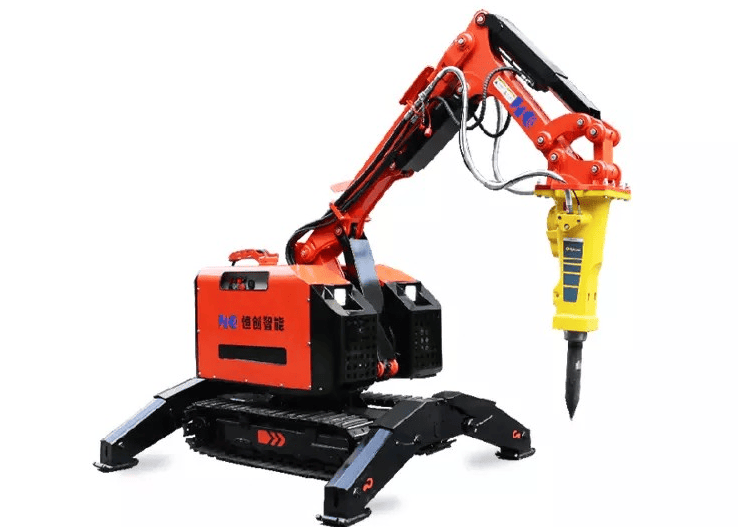
Mining operations often require breaking down large, unmanageable rocks into smaller, transportable pieces. This is where Rockbreaker Boom Systems play a crucial role. These stationary machines are designed to handle oversized materials, ensuring smooth operations in crushing plants and mining sites. Additionally, they improve safety and efficiency by eliminating the need for manual labor in hazardous conditions. In this article, we’ll explore the stationary rock breaker, its related systems, and other aspects of this essential mining equipment.
What is a Hydraulic Breaker?
A hydraulic breaker, often referred to as a hydraulic hammer, is a heavy-duty attachment for excavators, backhoes, or stationary boom systems. It uses hydraulic pressure to deliver high-impact blows to break rocks, concrete, or other hard materials. Hydraulic breakers are commonly used in construction, mining, quarrying, and demolition industries.
The core mechanism of a hydraulic breaker involves a piston that moves back and forth inside a cylinder. Pressurized hydraulic fluid powers the piston, creating forceful blows. Whether used as part of a Rock Breaker Machine or a standalone attachment, hydraulic breakers are indispensable in breaking down tough materials efficiently.
How Does a Hydraulic Circuit Breaker Work?
A hydraulic circuit breaker operates by converting hydraulic energy into kinetic energy. This system includes several components such as:
Hydraulic Pump: Generates the necessary pressure for the system.
Accumulator: Stores energy to optimize the breaker’s performance.
Control Valves: Regulate the flow and pressure of hydraulic fluid.
Piston and Tool: The piston transmits energy to the tool, which strikes the material.
The hydraulic breaker’s power comes from a closed-loop hydraulic circuit. The fluid is pressurized, forcing the piston to move rapidly and deliver repetitive blows. This mechanism is why hydraulic breakers are ideal for breaking rocks of various sizes and hardness.
What is a Lump Breaker in Mining?
A lump breaker is a specialized machine used to crush large lumps of materials into smaller pieces. While similar in function to Rock Breaker Systems, lump breakers are mainly used to process materials like coal, ore, or minerals in mining. By reducing the size of lumps, these machines ensure smooth material flow in conveyors, crushers, and mills.
Unlike traditional stationary rock breakers, lump breakers use rotating blades or hammers to crush materials. They are particularly useful in mining operations where materials often form large, solid masses due to moisture or compaction.
What Are the Three Types of Breakers?
Breakers, including rock breakers and hydraulic hammers, can be categorized into three main types:
Hydraulic Rock Breakers: These are powered by pressurized hydraulic fluid and are highly effective in breaking hard rocks and concrete.
Pneumatic Breakers: Operate using compressed air and are often used in smaller-scale applications.
Mechanical Breakers: These rely on manual or mechanical force to break materials but are less common in modern mining operations.
Among these, stationary rock breaker systems are typically hydraulic due to their efficiency and power in mining environments. They are often installed alongside crushers to handle oversized rocks.
What is the Machine That Breaks Rocks?
The primary machine used to break rocks is the Rock Breaker Machine. These machines come in various forms, including:
Stationary Rock Breaker Systems: Fixed installations near crushers, designed to handle oversized rocks that can’t pass through the crusher.
Excavator-Mounted Breakers: Attachments used with excavators for mobile rock-breaking tasks.
Portable Rock Breakers: Smaller, mobile units used in construction and smaller-scale mining.
Each of these machines plays a vital role in breaking rocks efficiently, minimizing downtime, and ensuring operational safety.
What is the Function of a Rock Breaker Machine?
The primary function of a Rock Breaker Machine is to reduce the size of large rocks or boulders, making them manageable for further processing. In mining operations, these machines are used to:
Break down oversized rocks that cannot fit into crushers.
Prevent blockages in material-handling systems.
Enhance safety by eliminating manual rock-breaking tasks.
Additionally, stationary rock breaker systems are strategically placed near crushers or grizzlies to handle rocks too large for the equipment. By breaking these rocks into smaller pieces, the machine improves efficiency and reduces equipment wear and tear.
What is the Purpose of a Rockbreaker?
The purpose of a Rockbreaker is to ensure seamless operations in mining and construction by breaking hard, oversized materials. Key objectives include:
Improving Efficiency: By reducing rock size, Rockbreaker Boom Systems enable smooth material flow in crushers and conveyors.
Enhancing Safety: Eliminating manual rock-breaking tasks reduces the risk of accidents in hazardous environments.
Minimizing Downtime: By preventing blockages in crushers, these systems ensure continuous operation.
Whether used as a stationary rock breaker or a mobile attachment, the Rockbreaker is a critical tool in modern mining and construction.
How Are Rock Breakers Used on an Excavator?
Rock breakers are commonly installed on excavators to provide mobility and versatility in mining and construction operations. The process involves attaching a hydraulic breaker to the excavator’s arm, allowing it to:
Break rocks in hard-to-reach areas.
Perform demolition tasks in construction.
Reduce oversized materials at mining sites.
Excavator-mounted breakers are particularly useful for operations where a stationary rock breaker system is not feasible. Their mobility allows operators to handle rock-breaking tasks across various locations efficiently.
What is the Difference Between a Rock Breaker and an Excavator?
While a rock breaker and an excavator are often used together, they serve different purposes:
Rock Breaker: A tool or machine designed specifically for breaking hard materials like rocks, concrete, or ore. It can be stationary or attached to other equipment.
Excavator: A versatile machine used for digging, lifting, and moving materials. When fitted with a rock breaker attachment, it can perform rock-breaking tasks.
In mining, stationary rock breaker systems are used for large-scale operations, while excavator-mounted breakers provide flexibility and mobility for smaller tasks.
Conclusion
The Rockbreaker Boom System, along with its related equipment such as stationary rock breakers, rock breaker machines, and hydraulic breakers, plays an essential role in mining and construction. These systems enhance efficiency, improve safety, and ensure seamless operations by breaking down oversized materials into manageable sizes.
From understanding the function of rock breaker machines to exploring their integration with excavators, this article highlights the importance of these systems in modern industries. Whether used in stationary setups or as mobile attachments, rock breakers are indispensable tools that contribute to the success of mining and construction projects.